- FCO 배우 고윤정 [15]
- FCO 감스트 역량 파급력 개쩌네 [14]
- 로아 뉴비를 위한 로스트아크 직업 추천! [221]
- 걸그룹 정채연 인스타 [10]
- 차벤 우리 동네 당근 근황.jpg [6]
인디 게임 강좌
내댓글
모바일 상단 메뉴
본문 페이지
[코코스2D] [Box2D] #13 - 기어 조인트
조회: 2119
2017-07-12 19:08:27
Document Version : V1.3 - 2017.07.12 with cocos2d-x 3.15.1
Document Version : V1.2 - 2015.06.08 with cocos2d-x 3.6
Document Version : V1.1 - 2014.03.14 with cocos2d-x 3.0beta2
Document Version : V1.0 - 2013.07.10 with cocos2d-x 2.1.4
제 책인 "시작하세요! Cocos2d-x 3.0 프로그래밍" 내용을 3.15.1 버전에 맞게 수정하여 올리고 있습니다.
이 글은 네이버카페 "Cocos2d-x 사용자 모임"에 동시에 게재되고 있습니다.
개발환경 :
- Windows7
- Visual Studio Community 2017
- Cocos2d-x 3.15.1
- 사용 프로젝트 : proj.win32
기어 조인트
커맨드창을 열어 원하는 디렉터리로 이동한 후에, 다음과 같이 cocos 명령어를 이용하여 새로운 프로젝트를 생성합니다.
c:> cocos new Box2dEx12 -p com.study.box12 -l cpp ↵
Box2dEx04의 모든 코드를 방금 만든 Box2dEx12에 적용시킵니다.
Box2dEx04의 Classes 폴더의 다음 파일들을 Box2dEx12의 Classes 폴더에 덮어 쓰면 됩니다.
■ HelloWorldScene.h
■ HelloWorldScene.cpp
■ GLES-Render.h
■ GLES-Render.cpp
그러고 나서 다음의 디렉터리에서
{Cocos2d-x가 설치된 디렉터리} / tests / cpp-tests / Resources / Images
아래의 파일을 찾아 리소스 폴더에 추가합니다.
■ blocks.png
Box2dEx12는 Box2dEx04 - 마우스 조인트까지 적용된 상태에서 시작합니다.
헤더 부분은 변경된 점이 없습니다.
[ HelloWorldScene.h – 박스2D 기어 조인트 ]
… 생략 : Box2dEx04의 코드와 같음 …
다음은 기어 조인트 프로젝트에서 Box2dEx04와 달라진 코드 부분입니다.
setBox2dWorld 메서드에서 기어 조인트를 생성하는 부분만이 추가되고 다른 것은 변한 것이 없습니다.
[ HelloWorldScene.cpp – 박스2D 기어 조인트 ]
… 생략 : Box2dEx04의 코드와 같음 …
void HelloWorld::setBox2dWorld()
{
// 마우스 조인트 바디를 생성해서 월드에 추가한다.
bDrag = false;
gbody = this->addNewSprite(Vec2(0, 0), Size(0, 0), b2_staticBody, nullptr, 0);
// *****************************************************************************
b2GearJointDef gearJointDef;
b2RevoluteJointDef jointDef1;
b2RevoluteJointDef jointDef2;
b2RevoluteJoint* joint1;
b2RevoluteJoint* joint2;
b2Body* body0 = this->addNewSprite(Vec2(240, 160), Size(160, 60),
b2_staticBody, nullptr, 0);
b2Body* body1 = this->addNewSprite(Vec2(240 - 40, 160), Size(40, 40),
b2_dynamicBody, nullptr, 1);
b2Body* body2 = this->addNewSprite(Vec2(240 + 20, 160), Size(80, 80),
b2_dynamicBody, nullptr, 1);
jointDef1.Initialize(body0, body1, body1->GetPosition());
jointDef2.Initialize(body0, body2, body2->GetPosition());
jointDef1.enableMotor = true;
jointDef1.motorSpeed = 1;
jointDef1.maxMotorTorque = 10;
// joint1 생성전에 위 모터의 속성들이 정의되어야 한다.
joint1 = (b2RevoluteJoint *)_world->CreateJoint(&jointDef1);
joint2 = (b2RevoluteJoint *)_world->CreateJoint(&jointDef2);
gearJointDef.bodyA = body1;
gearJointDef.bodyB = body2;
gearJointDef.joint1 = (b2Joint *)joint1;
gearJointDef.joint2 = (b2Joint *)joint2;
gearJointDef.ratio = 2.0;
_world->CreateJoint(&gearJointDef);
}
… 생략 : Box2dEx04의 코드와 같음 …
기어 조인트는 톱니바퀴가 서로 연결되어 있는 것처럼 동작을 한다고 설명했습니다. 시계 부품의 톱니바퀴를 생각하면 될 것입니다. 두 바디의 크기가 서로 같을 필요는 없습니다. 하지만 바디데프의 유저데이타에 넣을 스프라이트의 크기를 생각해서 상식적으로 맞추어 줄 필요는 있습니다.
위 코드는 일단 정적인 바디인 body0을 만들어 화면에 고정시키고 그 정적인 바디에 동적인 바디 둘을 붙여서 기어 구성을 하였습니다.
body1을 body0에 리볼류트 조인트로 연결하고, body2도 body0에 리볼류트 조인트로 연결했습니다.
b2RevoluteJoint* joint1;
b2RevoluteJoint* joint2;
b2Body* body0 = this->addNewSprite(Vec2(240, 160), Size(160, 60),
b2_staticBody, nullptr, 0);
b2Body* body1 = this->addNewSprite(Vec2(240 - 40, 160), Size(40, 40),
b2_dynamicBody, nullptr, 1);
b2Body* body2 = this->addNewSprite(Vec2(240 + 20, 160), Size(80, 80),
b2_dynamicBody, nullptr, 1);
jointDef1.Initialize(body0, body1, body1->GetPosition());
jointDef2.Initialize(body0, body2, body2->GetPosition());
body1은 자동으로 회전이 되도록 모터를 켜고 힘을 주었습니다. body2는 별도의 설정을 하지 않았기 때문에 여기까지만 코드를 작성했다면 body1만 회전하게 됩니다.
jointDef1.enableMotor = true;
jointDef1.motorSpeed = 1;
jointDef1.maxMotorTorque = 10;
여기서 body1 과 body2를 기어 조인트로 연결을 하고 body1이 body2보다 2배 빠른 비율로 회전하게 구성을 하였습니다.
gearJointDef.bodyA = body1;
gearJointDef.bodyB = body2;
gearJointDef.joint1 = (b2Joint *)joint1;
gearJointDef.joint2 = (b2Joint *)joint2;
gearJointDef.ratio = 2.0;
_world->CreateJoint(&gearJointDef);
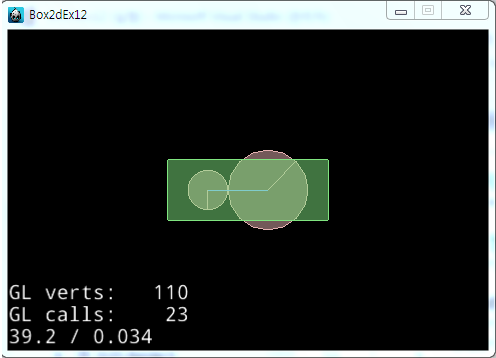
이제 실행을 하면 다음과 같이 body1이 body2에 비해 2배로 빨리 도는 것을 확인할 수 있는데, 시작부터 바로 되는 것은 아니고 자세히 보면 한바퀴 돌고 나서부터 인 것을 알 수 있습니다. 자동차의 엑셀을 밟으면 바로 시속 100km가 나오지 않듯이 어느 정도 시간이 지나야 되는 것을 확인할 수 있습니다.
아래 URL을 전체선택하고 복사하세요.
 내폰젤무거워
내폰젤무거워

모바일 게시판 하단버튼
지금 뜨는 인벤
더보기+모바일 게시판 리스트
-
 0 댓글언리얼 [지원사업] 청년취업사관학교(새싹) 언리얼엔진 게임프로그래머 양성과정 교육생 모집 [어소트락평생교육원]정부지원사업 Lv.1 조회 97 04-15
0 댓글언리얼 [지원사업] 청년취업사관학교(새싹) 언리얼엔진 게임프로그래머 양성과정 교육생 모집 [어소트락평생교육원]정부지원사업 Lv.1 조회 97 04-15 -
 0 댓글언리얼 [지원사업] 청년취업사관학교(새싹) 언리얼엔진 게임프로그래머 양성과정 교육생 모집 [어소트락평생교육원]정부지원사업 Lv.1 조회 148 04-12
0 댓글언리얼 [지원사업] 청년취업사관학교(새싹) 언리얼엔진 게임프로그래머 양성과정 교육생 모집 [어소트락평생교육원]정부지원사업 Lv.1 조회 148 04-12 -
0 댓글유니티 [정부지원] 뉴딜일자리 - 유니티(Unity)기반 게임·XR 콘텐츠 개발자 과정 - 교육비 전액 무료정부지원사업 Lv.1 조회 175 04-02
-
 0 댓글언리얼 [전액국비지원] 청년취업사관학교(새싹) 언리얼엔진 게임프로그래머 양성과정 교육생 모집 [어소트락평생교육원]정부지원사업 Lv.1 조회 175 04-01
0 댓글언리얼 [전액국비지원] 청년취업사관학교(새싹) 언리얼엔진 게임프로그래머 양성과정 교육생 모집 [어소트락평생교육원]정부지원사업 Lv.1 조회 175 04-01 -
0 댓글유니티 [정부지원] 뉴딜일자리 - 유니티(Unity)기반 게임·XR 콘텐츠 개발자 과정 - 교육비 전액 무료정부지원사업 Lv.1 조회 127 03-12
-
0 댓글언리얼 메타버스/XR 3D 캐릭터 제작자 양성 과정뭉순 Lv.4 조회 384 03-11
-
 0 댓글유니티 [전액국비지원] 뉴딜일자리 - 유니티(Unity)기반 게임·XR 콘텐츠 개발자 과정 - 교육비 전액 무료정부지원사업 Lv.1 조회 420 03-08
0 댓글유니티 [전액국비지원] 뉴딜일자리 - 유니티(Unity)기반 게임·XR 콘텐츠 개발자 과정 - 교육비 전액 무료정부지원사업 Lv.1 조회 420 03-08 -
 0 댓글유니티 [뱀서라이크 17] 모바일 빌드하기
0 댓글유니티 [뱀서라이크 17] 모바일 빌드하기 골드메탈
Lv.86
조회 662
05-13
골드메탈
Lv.86
조회 662
05-13
-
 0 댓글유니티 [뱀서라이크 16] 로직 보완하기
골드메탈
Lv.86
조회 1263
04-15
0 댓글유니티 [뱀서라이크 16] 로직 보완하기
골드메탈
Lv.86
조회 1263
04-15
-
 0 댓글유니티 [뱀서라이크 15] 편리한 오디오 시스템 구축
골드메탈
Lv.86
조회 1324
04-13
0 댓글유니티 [뱀서라이크 15] 편리한 오디오 시스템 구축
골드메탈
Lv.86
조회 1324
04-13
-
0 댓글언리얼 [부산게임그래픽학원] 국비무료 3D게임그래픽 디자이너 취업교육생 모집부산예일 Lv.1 조회 1452 04-12
-
 0 댓글유니티 [뱀서라이크 14+] 플레이 캐릭터 선택
골드메탈
Lv.86
조회 1408
04-10
0 댓글유니티 [뱀서라이크 14+] 플레이 캐릭터 선택
골드메탈
Lv.86
조회 1408
04-10
-
 0 댓글유니티 [뱀서라이크 14] 플레이 캐릭터 선택
골드메탈
Lv.86
조회 1254
04-03
0 댓글유니티 [뱀서라이크 14] 플레이 캐릭터 선택
골드메탈
Lv.86
조회 1254
04-03
-
 0 댓글유니티 [뱀서라이크 13] 게임 시작과 종료
골드메탈
Lv.86
조회 1288
03-28
0 댓글유니티 [뱀서라이크 13] 게임 시작과 종료
골드메탈
Lv.86
조회 1288
03-28
-
 0 댓글유니티 [뱀서라이크 12] 레벨업 시스템
골드메탈
Lv.86
조회 1164
03-25
0 댓글유니티 [뱀서라이크 12] 레벨업 시스템
골드메탈
Lv.86
조회 1164
03-25
-
 0 댓글유니티 [뱀서라이크 11+] 플레이어 무기 장착 표현하기
골드메탈
Lv.86
조회 1161
03-22
0 댓글유니티 [뱀서라이크 11+] 플레이어 무기 장착 표현하기
골드메탈
Lv.86
조회 1161
03-22
-
 0 댓글유니티 [뱀서라이크 11] 능력 업그레이드 구현
골드메탈
Lv.86
조회 660
03-16
0 댓글유니티 [뱀서라이크 11] 능력 업그레이드 구현
골드메탈
Lv.86
조회 660
03-16
-
 0 댓글유니티 [뱀서라이크 10] HUD 제작하기
골드메탈
Lv.86
조회 1099
02-17
0 댓글유니티 [뱀서라이크 10] HUD 제작하기
골드메탈
Lv.86
조회 1099
02-17
-
 0 댓글유니티 [뱀서라이크 09] 타격감있는 몬스터 처치
골드메탈
Lv.86
조회 1195
02-05
0 댓글유니티 [뱀서라이크 09] 타격감있는 몬스터 처치
골드메탈
Lv.86
조회 1195
02-05
-
 0 댓글유니티 [뱀서라이크 08] 자동 원거리 공격 구현
골드메탈
Lv.86
조회 700
02-01
0 댓글유니티 [뱀서라이크 08] 자동 원거리 공격 구현
골드메탈
Lv.86
조회 700
02-01
-
 0 댓글유니티 [뱀서라이크 07] 회전하는 근접무기 구현
골드메탈
Lv.86
조회 654
01-26
0 댓글유니티 [뱀서라이크 07] 회전하는 근접무기 구현
골드메탈
Lv.86
조회 654
01-26
-
 0 댓글유니티 [뱀서라이크 06+] 소환레벨 적용하기
0 댓글유니티 [뱀서라이크 06+] 소환레벨 적용하기 골드메탈
Lv.86
조회 806
12-26
골드메탈
Lv.86
조회 806
12-26
-
 0 댓글유니티 [뱀서라이크 06] 오브젝트 풀링
골드메탈
Lv.86
조회 746
12-23
0 댓글유니티 [뱀서라이크 06] 오브젝트 풀링
골드메탈
Lv.86
조회 746
12-23
-
 0 댓글유니티 [뱀서라이크 05] 몬스터 만들기
골드메탈
Lv.86
조회 906
12-18
0 댓글유니티 [뱀서라이크 05] 몬스터 만들기
골드메탈
Lv.86
조회 906
12-18
-
 0 댓글유니티 [뱀서라이크 04] 무한 맵 이동
골드메탈
Lv.86
조회 1231
11-28
0 댓글유니티 [뱀서라이크 04] 무한 맵 이동
골드메탈
Lv.86
조회 1231
11-28
-
 0 댓글유니티 [뱀서라이크 03] 2D 애니메이션 제작하기
골드메탈
Lv.86
조회 894
11-20
0 댓글유니티 [뱀서라이크 03] 2D 애니메이션 제작하기
골드메탈
Lv.86
조회 894
11-20
-
 0 댓글유니티 [뱀서라이크 02+] 새로운 인풋시스템 적용하기
골드메탈
Lv.86
조회 792
11-19
0 댓글유니티 [뱀서라이크 02+] 새로운 인풋시스템 적용하기
골드메탈
Lv.86
조회 792
11-19
-
 0 댓글유니티 [뱀서라이크 02] 플레이어 이동 구현하기
골드메탈
Lv.86
조회 832
11-12
0 댓글유니티 [뱀서라이크 02] 플레이어 이동 구현하기
골드메탈
Lv.86
조회 832
11-12
-
 1 댓글유니티 [뱀서라이크 01] 2D 오브젝트 만들기
골드메탈
Lv.86
조회 878
11-11
1 댓글유니티 [뱀서라이크 01] 2D 오브젝트 만들기
골드메탈
Lv.86
조회 878
11-11
-
 0 댓글유니티 [뱀서라이크 00] 언데드 서바이버 개발 강좌 소개
골드메탈
Lv.86
조회 701
추천 1
11-11
0 댓글유니티 [뱀서라이크 00] 언데드 서바이버 개발 강좌 소개
골드메탈
Lv.86
조회 701
추천 1
11-11
-
0 댓글유니티 IT회사 취업 교육 일정 공유Dororoc Lv.1 조회 637 08-04
-
0 댓글유니티 [820만원 전액 지원] 유니티 공식 교육 기관!! 개발자 취업을 희망한다면??Dororoc Lv.1 조회 575 08-04
-
0 댓글유니티 유니티기반 XR콘텐츠개발실무신tls Lv.1 조회 590 08-02
-
 0 댓글유니티 유튜브에서 유니티 초보자용 동영상 강의를 시작했습니다!소피문 Lv.2 조회 5215 11-25
0 댓글유니티 유튜브에서 유니티 초보자용 동영상 강의를 시작했습니다!소피문 Lv.2 조회 5215 11-25 -
 1 댓글유니티 (제20강) 피격 HUD-3
1 댓글유니티 (제20강) 피격 HUD-3 Nowl
Lv.73
조회 9921
추천 5
09-03
Nowl
Lv.73
조회 9921
추천 5
09-03
-
 0 댓글유니티 (제19강) 피격 HUD-2
Nowl
Lv.73
조회 9421
추천 3
09-03
0 댓글유니티 (제19강) 피격 HUD-2
Nowl
Lv.73
조회 9421
추천 3
09-03
-
 1 댓글게임메이커 처음 만나는 GMS2 // 11. 게임을 EXE 파일로 만들기Zpink Lv.1 조회 7296 추천 1 05-14
1 댓글게임메이커 처음 만나는 GMS2 // 11. 게임을 EXE 파일로 만들기Zpink Lv.1 조회 7296 추천 1 05-14 -
 0 댓글게임메이커 처음 만나는 GMS2 // 10. 슈팅게임 제작 5Zpink Lv.1 조회 5737 05-14
0 댓글게임메이커 처음 만나는 GMS2 // 10. 슈팅게임 제작 5Zpink Lv.1 조회 5737 05-14 -
 0 댓글게임메이커 처음 만나는 GMS2 // 9. 슈팅게임 제작 4Zpink Lv.1 조회 5721 05-14
0 댓글게임메이커 처음 만나는 GMS2 // 9. 슈팅게임 제작 4Zpink Lv.1 조회 5721 05-14 -
 0 댓글게임메이커 처음 만나는 GMS2 // 8. 슈팅게임 제작 3Zpink Lv.1 조회 6397 05-14
0 댓글게임메이커 처음 만나는 GMS2 // 8. 슈팅게임 제작 3Zpink Lv.1 조회 6397 05-14