- 디아4 게임 접어요 [33]
- 오버워치2 11시즌 밸런스 패치 노트 (읽기 쉽게 수정) [25]
- 디아4 d4를 하는이유.. [32]
- 걸그룹 뉴진스 해린&하니 교복패션 [12]
- 차벤 여친 아낀다면, 운전대 못잡게... [40]
- 차벤 여사님, 급발진...아니죠? [4]
인디 게임 강좌
전체보기
모바일 검색
모바일 상단 메뉴
본문 페이지
[코코스2D] [Box2D] #15 - 충돌 처리
조회: 3499
2017-07-14 20:13:39
Document Version : V1.3 - 2017.07.14 with cocos2d-x 3.15.1
Document Version : V1.2 - 2015.06.08 with cocos2d-x 3.6
Document Version : V1.1 - 2014.03.14 with cocos2d-x 3.0beta2
Document Version : V1.0 - 2013.07.10 with cocos2d-x 2.1.4
제 책인 "시작하세요! Cocos2d-x 3.0 프로그래밍" 내용을 3.15.1 버전에 맞게 수정하여 올리고 있습니다.
이 글은 네이버카페 "Cocos2d-x 사용자 모임"에 동시에 게재되고 있습니다.
개발환경 :
- Windows7
- Visual Studio Community 2017
- Cocos2d-x 3.15.1
- 사용 프로젝트 : proj.win32
충돌 처리
박스2D는 두 바디 사이의 충돌을 처리하기 위해서 b2ContactListener를 제공합니다. 충돌이 시작하면 충돌에 관한 진행 상황을 b2ContactListener에서 모니터링 하게 되고, 다음의 네 가지 이벤트가 순서대로 호출되는데 충돌을 처리하기 위해서 모든 콜백 함수를 정의할 필요는 없습니다. 필요한 콜백 함수만 정의를 하고 사용하면 됩니다.
| 종류 | 설명 |
| Begin | 물리 시뮬레이션의 스텝에서 두 형태가 처음으로 접촉을 시작했을 때 호출됩니다. 해당 콜백 함수에서 FALSE 를 리턴하면 뒤이어 발생하는 이벤트를 무시할 수 있습니다. 그렇게 하면, preSolve, postSolve 콜백 함수는 호출되지 않으며 발생한 힘(충돌)을 계산하지 않게 됩니다. 그렇지만 end 콜백 함수는 여전히 호출됩니다. |
| preSolve | 두 형태가 접촉을 계속하는 동안 호출됩니다. Begin에서 FALSE를 리턴하면 해당 시뮬레이션 스텝에서 무시되며, Begin에서 TRUE를 리턴하면 정상 처리됩니다. 충돌 후 물리 계산이 되기 전입니다. |
| postSolve | 두 형태가 접촉 후, 충돌을 통한 물리 계산을 이미 처리했을 때 호출됩니다. 이 콜백 함수로 충돌력을 계산할 수 있는데 Impulse에 충돌의 충격량이 전달되어 옵니다. |
| End | 충돌 상황이 이번 스텝에서 해제됐을 때, 즉 두 바디의 접촉이 떨어졌을 때 호출됩니다. |
커맨드창을 열어 원하는 디렉터리로 이동한 후에, 다음과 같이 cocos 명령어를 이용하여 새로운 프로젝트를 생성합니다.
c:> cocos new Box2dEx14 -p com.study.box14 -l cpp ↵
Box2dEx04의 모든 코드를 방금 만든 Box2dEx14에 적용시킵니다.
Box2dEx04의 Classes 폴더의 다음 파일들을 Box2dEx14의 Classes 폴더에 덮어 쓰면 됩니다.
■ HelloWorldScene.h
■ HelloWorldScene.cpp
■ GLES-Render.h
■ GLES-Render.cpp
그러고 나서 다음의 디렉터리에서
{Cocos2d-x가 설치된 디렉터리} / tests / cpp-tests / Resources / Images
아래의 파일을 찾아 리소스 폴더에 추가합니다.
■ blocks.png
Box2dEx14는 Box2dEx04 - 마우스 조인트까지 적용된 상태에서 시작합니다.
헤더 부분에는 충돌을 처리하기 위한 메서드를 추가로 선언합니다.
로직에 필요한 변수도 하나 추가합니다.
[ HelloWorldScene.h – 박스2D 충돌 처리 ]
#ifndef __HELLOWORLD_SCENE_H__
#define __HELLOWORLD_SCENE_H__
#if (CC_TARGET_PLATFORM == CC_PLATFORM_WIN32)
#pragma execution_character_set("utf-8")
#endif
#include "cocos2d.h"
#include "Box2D/Box2D.h"
#include <GLES-Render.h>
#define PTM_RATIO 32
using namespace cocos2d;
class HelloWorld
: public cocos2d::Scene
, public b2ContactListener
{
public:
static cocos2d::Scene* createScene();
virtual bool init();
CREATE_FUNC(HelloWorld);
Size winSize;
Texture2D* texture;
b2World* _world;
// For debugging
GLESDebugDraw* m_debugDraw;
cocos2d::CustomCommand _customCmd;
bool createBox2dWorld(bool debug);
void setBox2dWorld();
~HelloWorld();
virtual void draw(cocos2d::Renderer* renderer, const cocos2d::Mat4& transform,
uint32_t flags) override;
void onDraw(const cocos2d::Mat4& transform, uint32_t flags);
void onEnter();
void onExit();
void tick(float dt);
bool bDrag;
b2Body* dragBody;
b2MouseJoint* mouseJoint;
b2Body* gbody;
b2Body* addNewSprite(Vec2 point, Size size, b2BodyType bodytype,
const char* spriteName, int type);
b2Body* getBodyAtTab(Point p);
bool onTouchBegan(Touch* touch, Event* event);
void onTouchMoved(Touch* touch, Event* event);
void onTouchEnded(Touch* touch, Event* event);
int num;
void BeginContact(b2Contact* contact);
void PreSolve(b2Contact* contact, const b2Manifold* oldManifold);
void PostSolve(b2Contact* contact, const b2ContactImpulse* impulse);
void EndContact(b2Contact* contact);
};
#endif // __HELLOWORLD_SCENE_H__
다음은 충돌 처리 프로젝트에서 Box2dEx04와 달라진 코드 부분입니다.
init 메서드에서 충돌 처리를 위한 리스너 설정을 추가하고, 충돌 처리를 위해 헤더에 추가한 메서드들을 정의합니다.
[ HelloWorldScene.cpp – 박스2D 충돌 처리 ]
#include "HelloWorldScene.h"
Scene* HelloWorld::createScene()
{
return HelloWorld::create();
}
bool HelloWorld::init()
{
if ( !Scene::init() )
{
return false;
}
/////////////////////////////
// 윈도우 크기를 구한다.
winSize = Director::getInstance()->getWinSize();
// 이미지의 텍스쳐를 구한다.
texture = Director::getInstance()->getTextureCache()->addImage("blocks.png");
// 월드 생성
if (this->createBox2dWorld(true))
{
// 월드에 충돌함수 클래스를 리스너에 추가함
_world->SetContactListener((b2ContactListener *)this);
srand((int)time(nullptr));
this->setBox2dWorld();
this->schedule(schedule_selector(HelloWorld::tick));
}
return true;
}
bool HelloWorld::createBox2dWorld(bool debug)
{
… 생략 : Box2dEx04의 코드와 같음 …
}
void HelloWorld::setBox2dWorld()
{
// 마우스 조인트 바디를 생성해서 월드에 추가한다.
bDrag = false;
gbody = this->addNewSprite(Vec2(0, 0), Size(0, 0), b2_staticBody, nullptr, 0);
// 바디를 생성해서 월드에 추가한다.
this->addNewSprite(Vec2(240, 160), Size(32, 32), b2_dynamicBody, "test", 0);
}
HelloWorld::~HelloWorld()
{
… 생략 : Box2dEx04의 코드와 같음 …
}
void HelloWorld::draw(Renderer *renderer, const Mat4 &transform, uint32_t flags)
{
… 생략 : Box2dEx04의 코드와 같음 …
}
void HelloWorld::onDraw(const Mat4 &transform, uint32_t flags)
{
… 생략 : Box2dEx04의 코드와 같음 …
}
void HelloWorld::onEnter()
{
… 생략 : Box2dEx04의 코드와 같음 …
}
void HelloWorld::onExit()
{
… 생략 : Box2dEx04의 코드와 같음 …
}
void HelloWorld::tick(float dt)
{
… 생략 : Box2dEx04의 코드와 같음 …
}
b2Body* HelloWorld::addNewSprite(Vec2 point, Size size, b2BodyType bodytype,
const char* spriteName, int type)
{
… 생략 : Box2dEx04의 코드와 같음 …
}
b2Body* HelloWorld::getBodyAtTab(Vec2 p)
{
… 생략 : Box2dEx04의 코드와 같음 …
}
bool HelloWorld::onTouchBegan(Touch* touch, Event* event)
{
… 생략 : Box2dEx04의 코드와 같음 …
}
void HelloWorld::onTouchMoved(Touch* touch, Event* event)
{
… 생략 : Box2dEx04의 코드와 같음 …
}
void HelloWorld::onTouchEnded(Touch* touch, Event* event)
{
… 생략 : Box2dEx04의 코드와 같음 …
}
void HelloWorld::BeginContact(b2Contact* contact)
{
num = 0;
log("Contact : Begin");
}
void HelloWorld::PreSolve(b2Contact* contact, const b2Manifold* oldManifold)
{
log("Contact : PreSolve");
}
void HelloWorld::PostSolve(b2Contact* contact, const b2ContactImpulse* impulse)
{
log("Contact : PostSolve .. %d", num++);
b2Fixture* fixA = contact->GetFixtureA();
b2Fixture* fixB = contact->GetFixtureB();
b2Body* bodyA = fixA->GetBody();
b2Body* bodyB = fixB->GetBody();
if (bodyA->GetType() == b2_dynamicBody || bodyB->GetType() == b2_dynamicBody)
{
log("Contact : impulse .. %f", impulse->normalImpulses[0]);
}
}
void HelloWorld::EndContact(b2Contact* contact)
{
log("Contact : End");
}
PostSolve 메서드에 파라미터로 들어오는 contact 매개 변수를 통해서 충돌이 일어난 두 바디의 Fixture를 구할 수 있고, Fixture로부터 Body를 구할 수 있습니다.
void HelloWorld::PostSolve(b2Contact* contact, const b2ContactImpulse* impulse)
{
b2Fixture* fixA = contact->GetFixtureA();
b2Fixture* fixB = contact->GetFixtureB();
b2Body* bodyA = fixA->GetBody();
b2Body* bodyB = fixB->GetBody();
}
코드를 완성하고 실행을 하면 공중에서 바디가 하나 만들어지고 중력의 영향을 받아 바닥으로 떨어질 것입니다.
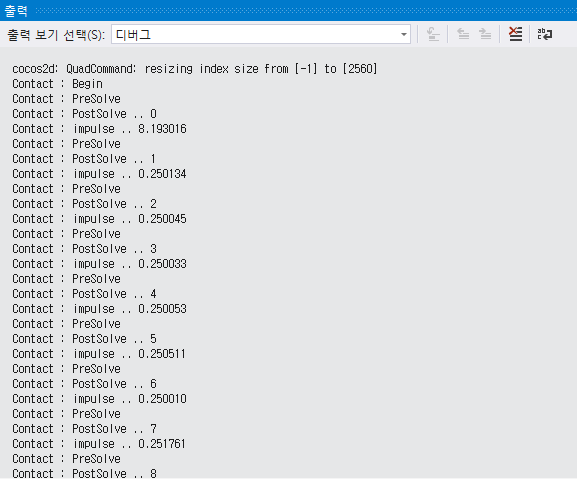
이 때 콘솔창(출력창)의 로그를 보면 다음과 같습니다. 처음에는 아무리 찾아봐도 End가 없을 것입니다. 바닥과의 충돌인데 반발력을 주지 않아서 계속 바닥과 맞닫아 있기 때문에 End 이벤트는 발생하지 않습니다.
그리고 계속해서 preSoleve 와 postSolve 이벤트가 반복적으로 발생함을 알 수 있습니다. 이는 물리적인 운동량이 없어질 때까지 반복이 됩니다.
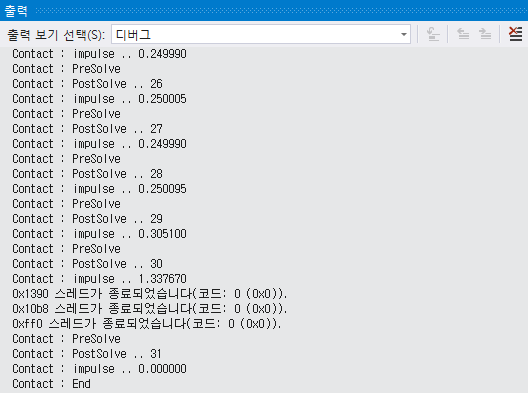
이제 바디를 마우스로 잡아서 끌어 올리면 End 이벤트가 발생하는 것을 볼 수 있습니다.
아래 URL을 전체선택하고 복사하세요.
 내폰젤무거워
내폰젤무거워

모바일 게시판 하단버튼
지금 뜨는 인벤
더보기+모바일 게시판 리스트
-
 1 댓글코코스2D [Box2D] #21 - One Way Platform 간단 구현
1 댓글코코스2D [Box2D] #21 - One Way Platform 간단 구현 내폰젤무거워
Lv.22
조회 4308
07-30
내폰젤무거워
Lv.22
조회 4308
07-30
-
 0 댓글코코스2D [Box2D] 응용5 : 그려서 생성하는 바디
내폰젤무거워
Lv.22
조회 3505
07-26
0 댓글코코스2D [Box2D] 응용5 : 그려서 생성하는 바디
내폰젤무거워
Lv.22
조회 3505
07-26
-
 0 댓글코코스2D [Box2D] 응용4 : 충돌 후의 자연스런 움직임
내폰젤무거워
Lv.21
조회 3682
07-25
0 댓글코코스2D [Box2D] 응용4 : 충돌 후의 자연스런 움직임
내폰젤무거워
Lv.21
조회 3682
07-25
-
 0 댓글코코스2D [Box2D] 응용3 : 2개의 월드
내폰젤무거워
Lv.21
조회 3406
07-24
0 댓글코코스2D [Box2D] 응용3 : 2개의 월드
내폰젤무거워
Lv.21
조회 3406
07-24
-
 0 댓글코코스2D [Box2D] 응용2 : 바디 회전
내폰젤무거워
Lv.21
조회 3590
07-23
0 댓글코코스2D [Box2D] 응용2 : 바디 회전
내폰젤무거워
Lv.21
조회 3590
07-23
-
 0 댓글코코스2D [Box2D] 응용1 : 무중력
내폰젤무거워
Lv.20
조회 4096
07-21
0 댓글코코스2D [Box2D] 응용1 : 무중력
내폰젤무거워
Lv.20
조회 4096
07-21
-
 0 댓글코코스2D [Box2D] #20 - 중력을 이용한 점프
내폰젤무거워
Lv.20
조회 4611
07-20
0 댓글코코스2D [Box2D] #20 - 중력을 이용한 점프
내폰젤무거워
Lv.20
조회 4611
07-20
-
 0 댓글코코스2D [Box2D] #19 - 조인트 제거
내폰젤무거워
Lv.20
조회 3185
07-19
0 댓글코코스2D [Box2D] #19 - 조인트 제거
내폰젤무거워
Lv.20
조회 3185
07-19
-
 0 댓글코코스2D [Box2D] #18 - 바디의 제거 & 스프라이트 제거
내폰젤무거워
Lv.19
조회 4070
07-18
0 댓글코코스2D [Box2D] #18 - 바디의 제거 & 스프라이트 제거
내폰젤무거워
Lv.19
조회 4070
07-18
-
 1 댓글코코스2D [Box2D] #17 - 중력가속도계
내폰젤무거워
Lv.19
조회 2597
07-17
1 댓글코코스2D [Box2D] #17 - 중력가속도계
내폰젤무거워
Lv.19
조회 2597
07-17
-
 0 댓글코코스2D [Box2D] #16 - 힘 주기
내폰젤무거워
Lv.19
조회 3027
07-16
0 댓글코코스2D [Box2D] #16 - 힘 주기
내폰젤무거워
Lv.19
조회 3027
07-16
-
 0 댓글코코스2D [Box2D] #15 - 충돌 처리
내폰젤무거워
Lv.18
조회 3500
07-14
0 댓글코코스2D [Box2D] #15 - 충돌 처리
내폰젤무거워
Lv.18
조회 3500
07-14
-
 0 댓글코코스2D [Box2D] #14 - 휠 조인트
내폰젤무거워
Lv.17
조회 2355
07-13
0 댓글코코스2D [Box2D] #14 - 휠 조인트
내폰젤무거워
Lv.17
조회 2355
07-13
-
 0 댓글코코스2D [Box2D] #13 - 기어 조인트
내폰젤무거워
Lv.17
조회 2162
07-12
0 댓글코코스2D [Box2D] #13 - 기어 조인트
내폰젤무거워
Lv.17
조회 2162
07-12
-
 0 댓글코코스2D [Box2D] #12 - 풀리 조인트
내폰젤무거워
Lv.16
조회 2094
07-11
0 댓글코코스2D [Box2D] #12 - 풀리 조인트
내폰젤무거워
Lv.16
조회 2094
07-11
-
 0 댓글코코스2D [Box2D] #11 - 프릭션 조인트
내폰젤무거워
Lv.16
조회 2164
07-09
0 댓글코코스2D [Box2D] #11 - 프릭션 조인트
내폰젤무거워
Lv.16
조회 2164
07-09
-
 0 댓글코코스2D [Box2D] #10 - 로프 조인트
내폰젤무거워
Lv.16
조회 2585
07-09
0 댓글코코스2D [Box2D] #10 - 로프 조인트
내폰젤무거워
Lv.16
조회 2585
07-09
-
 0 댓글코코스2D [Box2D] #09 - 디스턴스 조인트
내폰젤무거워
Lv.16
조회 1897
07-09
0 댓글코코스2D [Box2D] #09 - 디스턴스 조인트
내폰젤무거워
Lv.16
조회 1897
07-09
-
 0 댓글코코스2D [Box2D] #08 - 프리스마틱 조인트
내폰젤무거워
Lv.15
조회 1839
07-08
0 댓글코코스2D [Box2D] #08 - 프리스마틱 조인트
내폰젤무거워
Lv.15
조회 1839
07-08
-
 0 댓글코코스2D [Box2D] #07 - 웰드 조인트
내폰젤무거워
Lv.15
조회 1971
07-07
0 댓글코코스2D [Box2D] #07 - 웰드 조인트
내폰젤무거워
Lv.15
조회 1971
07-07
-
 0 댓글코코스2D [Box2D] #06 - 리볼루트 조인트
내폰젤무거워
Lv.15
조회 1760
07-06
0 댓글코코스2D [Box2D] #06 - 리볼루트 조인트
내폰젤무거워
Lv.15
조회 1760
07-06
-
 0 댓글코코스2D [Box2D] #05 - 마우스 조인트
내폰젤무거워
Lv.15
조회 2032
07-05
0 댓글코코스2D [Box2D] #05 - 마우스 조인트
내폰젤무거워
Lv.15
조회 2032
07-05
-
 0 댓글코코스2D [Box2D] #04 - 조인트(Joint)의 종류
0 댓글코코스2D [Box2D] #04 - 조인트(Joint)의 종류 내폰젤무거워
Lv.14
조회 3530
07-04
내폰젤무거워
Lv.14
조회 3530
07-04
-
 0 댓글코코스2D [Box2D] #03 - 바디(Body)의 종류
내폰젤무거워
Lv.14
조회 2901
추천 1
07-03
0 댓글코코스2D [Box2D] #03 - 바디(Body)의 종류
내폰젤무거워
Lv.14
조회 2901
추천 1
07-03
-
 0 댓글코코스2D [Box2D] #02 - 디버그 모드 사용하기
내폰젤무거워
Lv.14
조회 3408
추천 2
07-02
0 댓글코코스2D [Box2D] #02 - 디버그 모드 사용하기
내폰젤무거워
Lv.14
조회 3408
추천 2
07-02
-
 6 댓글코코스2D [Box2D] #01 - 기본 예제 만들기
6 댓글코코스2D [Box2D] #01 - 기본 예제 만들기 내폰젤무거워
Lv.14
조회 6856
추천 3
07-01
내폰젤무거워
Lv.14
조회 6856
추천 3
07-01