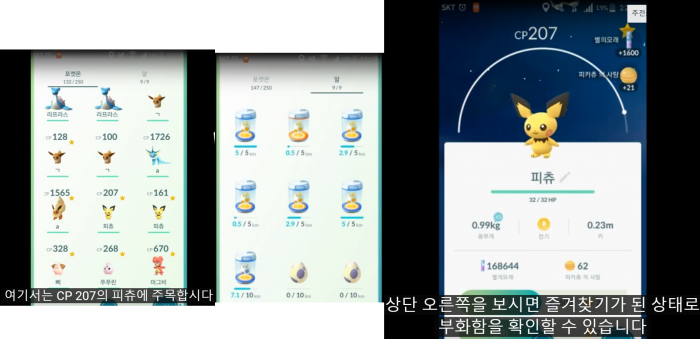
-중간 사진을 보시면 5km알 두개가 부화 예정에 있는데요
이 둘 중 하나에 피츄가 들어있고 이를 부화전에 미리 살펴보려고 합니다
왼쪽 사진은 아직 부화 전에 포켓몬 목록에 피츄가 등장한 모습이고,
저는 이를 표시하기 위해 피츄를 즐겨찾기에 추가해놨습니다
오른쪽 사진은 부화 직후를 캡쳐한 모습으로 즐겨찾기에 등록된 채 부화한 걸 확인할 수 있습니다!
사진이라 안 와닿을수도 있으니 이 부분은 영상으로 확인하시길 바랍니다!!
++ 관련해 추가 내용입니다!
++ 포켓몬 슬롯 갯수 xx/250에는 x/9 알 갯수가 포함됩니다
++ 예를 들면 지금 포켓몬이 5마리인데 알이 9개면 포켓몬 슬롯은 14/250 요래 표현됩니다
++ 여기서 알 거리표시는 포켓몬 숨김 해제 타이머로 보시면 될꺼 같은데
++ 포켓몬 슬롯에서 5마리만 보이다가 거리 다 채우고 나면 알 부화 모션과 상관없이
++ 14/250를 유지한 상태로 포켓몬 6마리가 포켓몬 슬롯에 모습을 보이게 된다는 개념입니다 ㅎ
++ 요걸 보면 알은 획득할 때부터 포켓몬이 정해진다는 걸 알 수 있습니다!
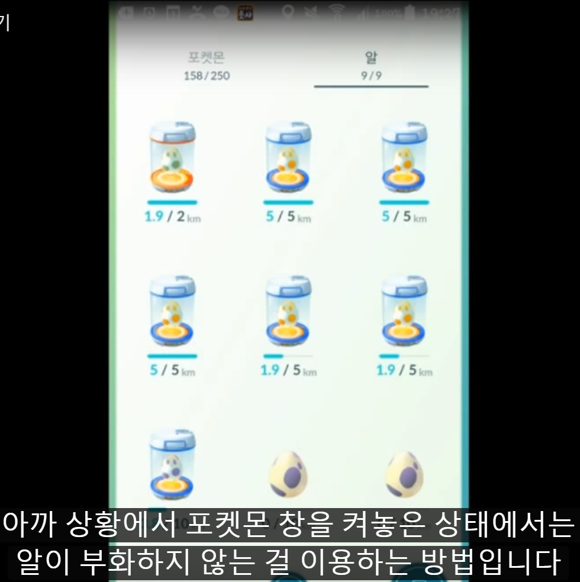
-알 부화 미리보기 상황에서 한가지 인지해야 될 상황이 있습니다
포켓몬 창을 보고 있는 상태에서는 부화 모션이 진행되지 않는다는 것입니다
이를 이용해 여러 알을 한번에 몰아까봤습니다
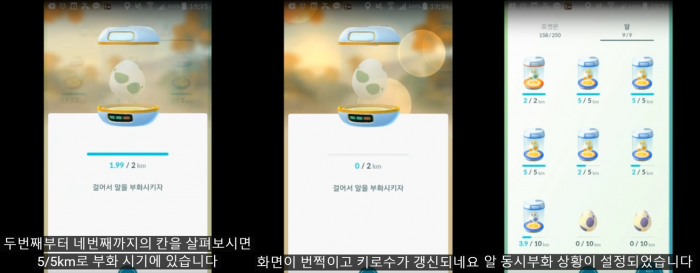
-자막에서처럼 2km알이 1.99/2km 상황에 5km 알 두개가 부화 예정에 있었습니다
이 1.99km 알도 기다렸다가 몰아까봅시다
화면이 번쩍이면서 1.99에서 0으로 갱신되며 창을 닫아보면
2km 알 한개, 5km 알 두개가 부화 상태로 대기하는 모습을 확인할 수 있습니다
-창을 닫고나면 부화가 진행되는데요
여기서 주목한 만한 부분은 가장 늦게 부화해야 될 2km알이 제일 먼저 부화한다는 것입니다
또 2km알과 5km알의 부화 모션 사이는 잠시 딜레이가 존재하고
같은 km수의 알끼리는 모션의 끊김이 없습니다
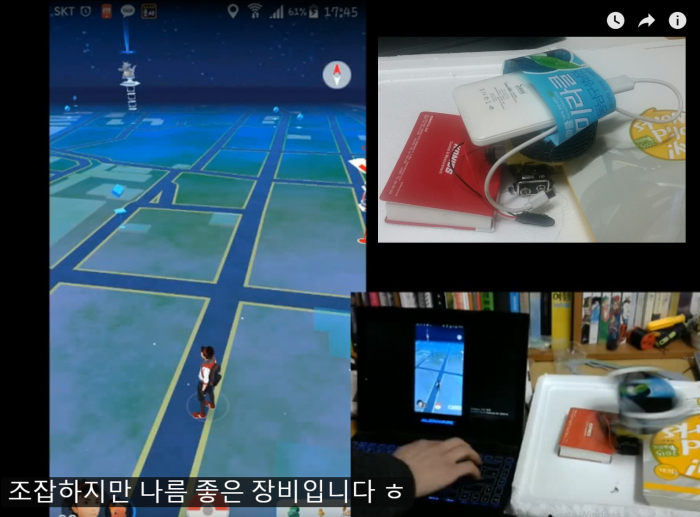
-이러한 데이터를 수집하기 위해 제가 제작한 도구들입니다
도구 제작 아이디어는 로봇 청소기나 고양이에서
회전 반경을 어디까지 줄일 수 있을까에서 시작됐습니다
여튼 결론은 제자리 회전도 가능하단 것이였고 이에 다음과 같은 장비를 제작하였습니다 ㅎ
회전하는 동안에는 화면의 직접 조작이 불가해 미러링을 통해 조작합니다
시연 영상 확인해주세요!
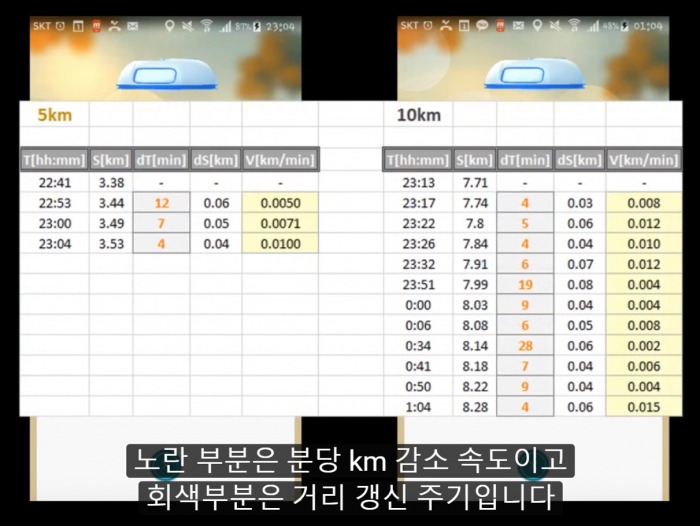
-다음은 아까 실험 장비로 측정한 결과값입니다
실험 대상은 5km, 10km알 두개입니다
각각 1분 단위로 캡쳐하였고, 그 중 거리 변화가 있는 사진들만 추려냈습니다
주목할 부분은 회색과 노랑 부분입니다
노랑 부분을 살펴보니 제 경우 전반적으로 1분에 0.01km정도가 줄어들었습니다
회색 부분에서는 전반적인 알 갱신 주기를 유추할 수 있는데 오차를 고려하면
대충 3~4분에 한번 갱신되며, 이 시간이 지나고 나면 갱신 거리가 초기화되는 듯합니다
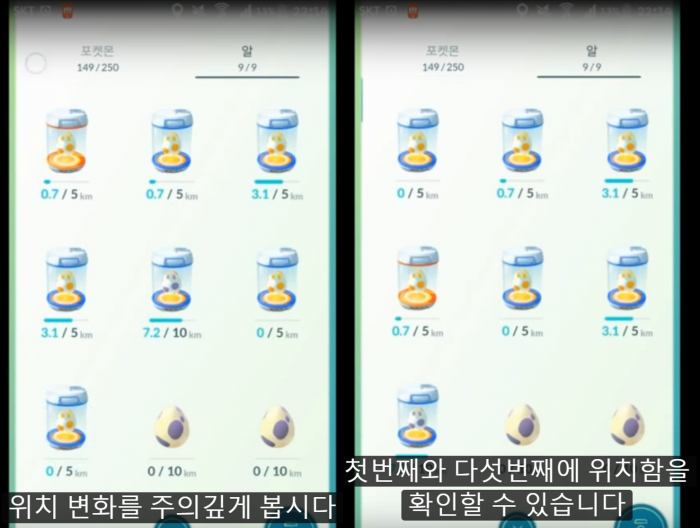
-살펴볼 부분은 알 배치 순서입니다
왼쪽 사진을 보면 5km 알 두개를 새로 부화기에 넣었는데요
창을 껏다 켜면 이 두 알이 각각 첫번째와 다섯번째로 자리를 이동합니다
3.시연 영상
자막 켜주시고 봐주세요
-영상 관련해서도 속도가 빠르다던가 등 피드백 부탁드립니다!
긴 글 읽어주셔서 감사합니다!
언제나 피드백 환영!
---------------------------
+++외골수 님이랑 BeShine 님의 피드백 참고해서 몇가지 다시 실험했더니!
+++아주 쓸만한 결과가 나왔습니다!
+++원래 다음주 일본 가야되서 갔다와서 진행하려고 했는데
+++덕분에 빨리 결과가 나와서 내일이나 모레 ver.2 만들어서 정리해보려고 합니다!
+++응원과 피드백 감사합니다!
---------------------------


 쑤쑤
쑤쑤