- 로아 왜 1650 7멸홍 대신 1620 10멸홍을 데려가냐고? [402]
- 와우 어떤 유저의 어떤 전투부대 [8]
- 메이플 ㅇㅂ) 팡이요 드릴말씀 공지 [164]
- 차벤 아줌마 거기에 정차하시면 ㅡㅡ;;; [7]
- 차벤 벤(츠)부심..... [14]
- 차벤 모닝 잘못은 했는데, 억울할듯 ㅋ [2]
인디 게임 강좌
전체보기
모바일 상단 메뉴
본문 페이지
[코코스2D] [Box2D] #13 - 기어 조인트
조회: 2189
2017-07-12 19:08:27
Document Version : V1.3 - 2017.07.12 with cocos2d-x 3.15.1
Document Version : V1.2 - 2015.06.08 with cocos2d-x 3.6
Document Version : V1.1 - 2014.03.14 with cocos2d-x 3.0beta2
Document Version : V1.0 - 2013.07.10 with cocos2d-x 2.1.4
제 책인 "시작하세요! Cocos2d-x 3.0 프로그래밍" 내용을 3.15.1 버전에 맞게 수정하여 올리고 있습니다.
이 글은 네이버카페 "Cocos2d-x 사용자 모임"에 동시에 게재되고 있습니다.
개발환경 :
- Windows7
- Visual Studio Community 2017
- Cocos2d-x 3.15.1
- 사용 프로젝트 : proj.win32
기어 조인트
커맨드창을 열어 원하는 디렉터리로 이동한 후에, 다음과 같이 cocos 명령어를 이용하여 새로운 프로젝트를 생성합니다.
c:> cocos new Box2dEx12 -p com.study.box12 -l cpp ↵
Box2dEx04의 모든 코드를 방금 만든 Box2dEx12에 적용시킵니다.
Box2dEx04의 Classes 폴더의 다음 파일들을 Box2dEx12의 Classes 폴더에 덮어 쓰면 됩니다.
■ HelloWorldScene.h
■ HelloWorldScene.cpp
■ GLES-Render.h
■ GLES-Render.cpp
그러고 나서 다음의 디렉터리에서
{Cocos2d-x가 설치된 디렉터리} / tests / cpp-tests / Resources / Images
아래의 파일을 찾아 리소스 폴더에 추가합니다.
■ blocks.png
Box2dEx12는 Box2dEx04 - 마우스 조인트까지 적용된 상태에서 시작합니다.
헤더 부분은 변경된 점이 없습니다.
[ HelloWorldScene.h – 박스2D 기어 조인트 ]
… 생략 : Box2dEx04의 코드와 같음 …
다음은 기어 조인트 프로젝트에서 Box2dEx04와 달라진 코드 부분입니다.
setBox2dWorld 메서드에서 기어 조인트를 생성하는 부분만이 추가되고 다른 것은 변한 것이 없습니다.
[ HelloWorldScene.cpp – 박스2D 기어 조인트 ]
… 생략 : Box2dEx04의 코드와 같음 …
void HelloWorld::setBox2dWorld()
{
// 마우스 조인트 바디를 생성해서 월드에 추가한다.
bDrag = false;
gbody = this->addNewSprite(Vec2(0, 0), Size(0, 0), b2_staticBody, nullptr, 0);
// *****************************************************************************
b2GearJointDef gearJointDef;
b2RevoluteJointDef jointDef1;
b2RevoluteJointDef jointDef2;
b2RevoluteJoint* joint1;
b2RevoluteJoint* joint2;
b2Body* body0 = this->addNewSprite(Vec2(240, 160), Size(160, 60),
b2_staticBody, nullptr, 0);
b2Body* body1 = this->addNewSprite(Vec2(240 - 40, 160), Size(40, 40),
b2_dynamicBody, nullptr, 1);
b2Body* body2 = this->addNewSprite(Vec2(240 + 20, 160), Size(80, 80),
b2_dynamicBody, nullptr, 1);
jointDef1.Initialize(body0, body1, body1->GetPosition());
jointDef2.Initialize(body0, body2, body2->GetPosition());
jointDef1.enableMotor = true;
jointDef1.motorSpeed = 1;
jointDef1.maxMotorTorque = 10;
// joint1 생성전에 위 모터의 속성들이 정의되어야 한다.
joint1 = (b2RevoluteJoint *)_world->CreateJoint(&jointDef1);
joint2 = (b2RevoluteJoint *)_world->CreateJoint(&jointDef2);
gearJointDef.bodyA = body1;
gearJointDef.bodyB = body2;
gearJointDef.joint1 = (b2Joint *)joint1;
gearJointDef.joint2 = (b2Joint *)joint2;
gearJointDef.ratio = 2.0;
_world->CreateJoint(&gearJointDef);
}
… 생략 : Box2dEx04의 코드와 같음 …
기어 조인트는 톱니바퀴가 서로 연결되어 있는 것처럼 동작을 한다고 설명했습니다. 시계 부품의 톱니바퀴를 생각하면 될 것입니다. 두 바디의 크기가 서로 같을 필요는 없습니다. 하지만 바디데프의 유저데이타에 넣을 스프라이트의 크기를 생각해서 상식적으로 맞추어 줄 필요는 있습니다.
위 코드는 일단 정적인 바디인 body0을 만들어 화면에 고정시키고 그 정적인 바디에 동적인 바디 둘을 붙여서 기어 구성을 하였습니다.
body1을 body0에 리볼류트 조인트로 연결하고, body2도 body0에 리볼류트 조인트로 연결했습니다.
b2RevoluteJoint* joint1;
b2RevoluteJoint* joint2;
b2Body* body0 = this->addNewSprite(Vec2(240, 160), Size(160, 60),
b2_staticBody, nullptr, 0);
b2Body* body1 = this->addNewSprite(Vec2(240 - 40, 160), Size(40, 40),
b2_dynamicBody, nullptr, 1);
b2Body* body2 = this->addNewSprite(Vec2(240 + 20, 160), Size(80, 80),
b2_dynamicBody, nullptr, 1);
jointDef1.Initialize(body0, body1, body1->GetPosition());
jointDef2.Initialize(body0, body2, body2->GetPosition());
body1은 자동으로 회전이 되도록 모터를 켜고 힘을 주었습니다. body2는 별도의 설정을 하지 않았기 때문에 여기까지만 코드를 작성했다면 body1만 회전하게 됩니다.
jointDef1.enableMotor = true;
jointDef1.motorSpeed = 1;
jointDef1.maxMotorTorque = 10;
여기서 body1 과 body2를 기어 조인트로 연결을 하고 body1이 body2보다 2배 빠른 비율로 회전하게 구성을 하였습니다.
gearJointDef.bodyA = body1;
gearJointDef.bodyB = body2;
gearJointDef.joint1 = (b2Joint *)joint1;
gearJointDef.joint2 = (b2Joint *)joint2;
gearJointDef.ratio = 2.0;
_world->CreateJoint(&gearJointDef);
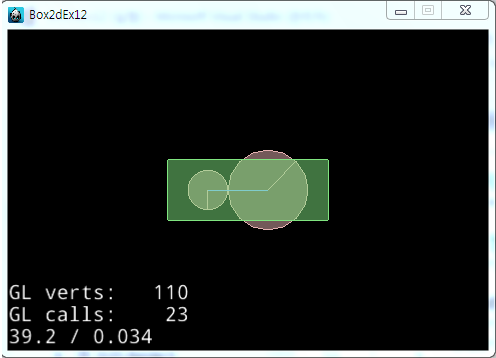
이제 실행을 하면 다음과 같이 body1이 body2에 비해 2배로 빨리 도는 것을 확인할 수 있는데, 시작부터 바로 되는 것은 아니고 자세히 보면 한바퀴 돌고 나서부터 인 것을 알 수 있습니다. 자동차의 엑셀을 밟으면 바로 시속 100km가 나오지 않듯이 어느 정도 시간이 지나야 되는 것을 확인할 수 있습니다.
아래 URL을 전체선택하고 복사하세요.
 내폰젤무거워
내폰젤무거워

모바일 게시판 하단버튼
지금 뜨는 인벤
더보기+모바일 게시판 리스트
-
 1 댓글코코스2D [Box2D] #21 - One Way Platform 간단 구현
1 댓글코코스2D [Box2D] #21 - One Way Platform 간단 구현 내폰젤무거워
Lv.22
조회 4339
07-30
내폰젤무거워
Lv.22
조회 4339
07-30
-
 0 댓글코코스2D [Box2D] 응용5 : 그려서 생성하는 바디
내폰젤무거워
Lv.22
조회 3530
07-26
0 댓글코코스2D [Box2D] 응용5 : 그려서 생성하는 바디
내폰젤무거워
Lv.22
조회 3530
07-26
-
 0 댓글코코스2D [Box2D] 응용4 : 충돌 후의 자연스런 움직임
내폰젤무거워
Lv.21
조회 3710
07-25
0 댓글코코스2D [Box2D] 응용4 : 충돌 후의 자연스런 움직임
내폰젤무거워
Lv.21
조회 3710
07-25
-
 0 댓글코코스2D [Box2D] 응용3 : 2개의 월드
내폰젤무거워
Lv.21
조회 3424
07-24
0 댓글코코스2D [Box2D] 응용3 : 2개의 월드
내폰젤무거워
Lv.21
조회 3424
07-24
-
 0 댓글코코스2D [Box2D] 응용2 : 바디 회전
내폰젤무거워
Lv.21
조회 3610
07-23
0 댓글코코스2D [Box2D] 응용2 : 바디 회전
내폰젤무거워
Lv.21
조회 3610
07-23
-
 0 댓글코코스2D [Box2D] 응용1 : 무중력
내폰젤무거워
Lv.20
조회 4114
07-21
0 댓글코코스2D [Box2D] 응용1 : 무중력
내폰젤무거워
Lv.20
조회 4114
07-21
-
 0 댓글코코스2D [Box2D] #20 - 중력을 이용한 점프
내폰젤무거워
Lv.20
조회 4631
07-20
0 댓글코코스2D [Box2D] #20 - 중력을 이용한 점프
내폰젤무거워
Lv.20
조회 4631
07-20
-
 0 댓글코코스2D [Box2D] #19 - 조인트 제거
내폰젤무거워
Lv.20
조회 3203
07-19
0 댓글코코스2D [Box2D] #19 - 조인트 제거
내폰젤무거워
Lv.20
조회 3203
07-19
-
 0 댓글코코스2D [Box2D] #18 - 바디의 제거 & 스프라이트 제거
내폰젤무거워
Lv.19
조회 4092
07-18
0 댓글코코스2D [Box2D] #18 - 바디의 제거 & 스프라이트 제거
내폰젤무거워
Lv.19
조회 4092
07-18
-
 1 댓글코코스2D [Box2D] #17 - 중력가속도계
내폰젤무거워
Lv.19
조회 2615
07-17
1 댓글코코스2D [Box2D] #17 - 중력가속도계
내폰젤무거워
Lv.19
조회 2615
07-17
-
 0 댓글코코스2D [Box2D] #16 - 힘 주기
내폰젤무거워
Lv.19
조회 3052
07-16
0 댓글코코스2D [Box2D] #16 - 힘 주기
내폰젤무거워
Lv.19
조회 3052
07-16
-
 0 댓글코코스2D [Box2D] #15 - 충돌 처리
내폰젤무거워
Lv.18
조회 3522
07-14
0 댓글코코스2D [Box2D] #15 - 충돌 처리
내폰젤무거워
Lv.18
조회 3522
07-14
-
 0 댓글코코스2D [Box2D] #14 - 휠 조인트
내폰젤무거워
Lv.17
조회 2370
07-13
0 댓글코코스2D [Box2D] #14 - 휠 조인트
내폰젤무거워
Lv.17
조회 2370
07-13
-
 0 댓글코코스2D [Box2D] #13 - 기어 조인트
내폰젤무거워
Lv.17
조회 2190
07-12
0 댓글코코스2D [Box2D] #13 - 기어 조인트
내폰젤무거워
Lv.17
조회 2190
07-12
-
 0 댓글코코스2D [Box2D] #12 - 풀리 조인트
내폰젤무거워
Lv.16
조회 2111
07-11
0 댓글코코스2D [Box2D] #12 - 풀리 조인트
내폰젤무거워
Lv.16
조회 2111
07-11
-
 0 댓글코코스2D [Box2D] #11 - 프릭션 조인트
내폰젤무거워
Lv.16
조회 2183
07-09
0 댓글코코스2D [Box2D] #11 - 프릭션 조인트
내폰젤무거워
Lv.16
조회 2183
07-09
-
 0 댓글코코스2D [Box2D] #10 - 로프 조인트
내폰젤무거워
Lv.16
조회 2608
07-09
0 댓글코코스2D [Box2D] #10 - 로프 조인트
내폰젤무거워
Lv.16
조회 2608
07-09
-
 0 댓글코코스2D [Box2D] #09 - 디스턴스 조인트
내폰젤무거워
Lv.16
조회 1917
07-09
0 댓글코코스2D [Box2D] #09 - 디스턴스 조인트
내폰젤무거워
Lv.16
조회 1917
07-09
-
 0 댓글코코스2D [Box2D] #08 - 프리스마틱 조인트
내폰젤무거워
Lv.15
조회 1855
07-08
0 댓글코코스2D [Box2D] #08 - 프리스마틱 조인트
내폰젤무거워
Lv.15
조회 1855
07-08
-
 0 댓글코코스2D [Box2D] #07 - 웰드 조인트
내폰젤무거워
Lv.15
조회 1990
07-07
0 댓글코코스2D [Box2D] #07 - 웰드 조인트
내폰젤무거워
Lv.15
조회 1990
07-07
-
 0 댓글코코스2D [Box2D] #06 - 리볼루트 조인트
내폰젤무거워
Lv.15
조회 1782
07-06
0 댓글코코스2D [Box2D] #06 - 리볼루트 조인트
내폰젤무거워
Lv.15
조회 1782
07-06
-
 0 댓글코코스2D [Box2D] #05 - 마우스 조인트
내폰젤무거워
Lv.15
조회 2050
07-05
0 댓글코코스2D [Box2D] #05 - 마우스 조인트
내폰젤무거워
Lv.15
조회 2050
07-05
-
 0 댓글코코스2D [Box2D] #04 - 조인트(Joint)의 종류
0 댓글코코스2D [Box2D] #04 - 조인트(Joint)의 종류 내폰젤무거워
Lv.14
조회 3549
07-04
내폰젤무거워
Lv.14
조회 3549
07-04
-
 0 댓글코코스2D [Box2D] #03 - 바디(Body)의 종류
내폰젤무거워
Lv.14
조회 2922
추천 1
07-03
0 댓글코코스2D [Box2D] #03 - 바디(Body)의 종류
내폰젤무거워
Lv.14
조회 2922
추천 1
07-03
-
 0 댓글코코스2D [Box2D] #02 - 디버그 모드 사용하기
내폰젤무거워
Lv.14
조회 3438
추천 2
07-02
0 댓글코코스2D [Box2D] #02 - 디버그 모드 사용하기
내폰젤무거워
Lv.14
조회 3438
추천 2
07-02
-
 6 댓글코코스2D [Box2D] #01 - 기본 예제 만들기
6 댓글코코스2D [Box2D] #01 - 기본 예제 만들기 내폰젤무거워
Lv.14
조회 6887
추천 3
07-01
내폰젤무거워
Lv.14
조회 6887
추천 3
07-01