… 생략 : Box2dEx04의 코드와 같음 …
void HelloWorld::setBox2dWorld()
{
// 마우스 조인트 바디를 생성해서 월드에 추가한다.
bDrag = false;
gbody = this->addNewSprite(Vec2(0, 0), Size(0, 0), b2_staticBody, nullptr, 0);
// *****************************************************************************
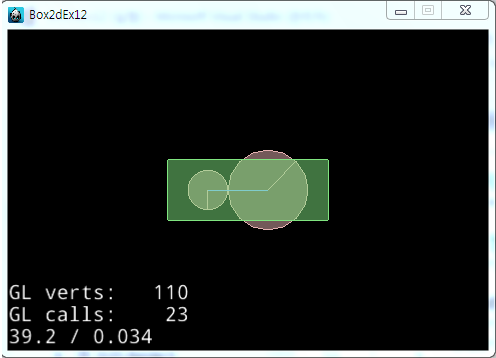
b2GearJointDef gearJointDef;
b2RevoluteJointDef jointDef1;
b2RevoluteJointDef jointDef2;
b2RevoluteJoint* joint1;
b2RevoluteJoint* joint2;
b2Body* body0 = this->addNewSprite(Vec2(240, 160), Size(160, 60),
b2_staticBody, nullptr, 0);
b2Body* body1 = this->addNewSprite(Vec2(240 - 40, 160), Size(40, 40),
b2_dynamicBody, nullptr, 1);
b2Body* body2 = this->addNewSprite(Vec2(240 + 20, 160), Size(80, 80),
b2_dynamicBody, nullptr, 1);
jointDef1.Initialize(body0, body1, body1->GetPosition());
jointDef2.Initialize(body0, body2, body2->GetPosition());
jointDef1.enableMotor = true;
jointDef1.motorSpeed = 1;
jointDef1.maxMotorTorque = 10;
// joint1 생성전에 위 모터의 속성들이 정의되어야 한다.
joint1 = (b2RevoluteJoint *)_world->CreateJoint(&jointDef1);
joint2 = (b2RevoluteJoint *)_world->CreateJoint(&jointDef2);
gearJointDef.bodyA = body1;
gearJointDef.bodyB = body2;
gearJointDef.joint1 = (b2Joint *)joint1;
gearJointDef.joint2 = (b2Joint *)joint2;
gearJointDef.ratio = 2.0;
_world->CreateJoint(&gearJointDef);
}
… 생략 : Box2dEx04의 코드와 같음 …
 내폰젤무거워
내폰젤무거워